近日,第44届日内瓦国际发明展在瑞士日内瓦举行。东北大学4个项目受邀参展,经演示、宣讲、评议,最终获得1项金奖、3项银奖。
材料科学与工程学院管仁国教授,申勇峰教授等发明的“连续流变扩展挤压+ACEF短流程制备高性能超细晶铝合金电工铝材”及“剪切振动耦合作用下高性能金属半固态流变挤压铸造”分别获得金奖和银奖。机械工程与自动化学院郝丽娜教授,程红太副教授等发明的“人工肌肉仿生驱动器”及“复杂工艺控制系统在线参数优化方法”获得日内瓦国际发明展银奖。
“连续流变扩展挤压+ACEF短流程制备高性能超细晶铝合金电工铝材”针对金属挤压工艺流程极长、能耗高的突出问题,提出建立了一种金属短流程连续流变扩展挤压方法,实现了从液态金属到产品的一步加工成形,比传统工艺节能40%,降低成本30%。基于该成形中的大变形机制,提出建立了一种短流程制备超细晶金属的方法ACEF(Accumulative continuous extrusion forming),与已有的ECAP(Equal-channel angular pressing)相比,具有短流程、低成本、大规模生产的优点。将两种方法相结合,制备了高性能电工铝材,产品综合性能优于国际同类产品。
“剪切振动耦合作用下高性能铝合金流变挤压铸造”提出建立了剪切振动耦合熔体处理方法,使金属晶粒充分细化与球化,并将此方法与挤压铸造相结合,实现了高效率、低成本流变挤压铸造,应用于高端零件制造,与传统挤压铸造相比,其加工效率与产品性能均显著提高。与传统挤压铸造相比:避免了枝晶偏析,生产效率与产品性能显著提高,A356合金抗拉强度和伸长率分别提高11.7%和21%。
现存的齿轮、液压等传统刚性驱动器具有结构复杂、运动灵活性差、功率重量比低等技术问题,限制了其在康复医疗和仿生机器人等领域的应用。“人工肌肉仿生驱动器”针对仿生结构、智能材料、驱动一体化的人工肌肉仿生驱动器,提供了三种人工肌肉的制备工艺、针对其强非线性的驱动控制方法和系统实现。人工肌肉包括离子交换聚合体金属材料(IPMC)、气动肌肉、鱼线-形状记忆合金等。针对人工肌肉动力学的强非线性,设计了自适应逆控制和无模型自适应等控制器。研制了多种结构形式的仿生驱动器、夹持器、仿人手臂和助力手臂等,可应用于仿人机器人、义肢、外骨骼等服务机器人。
“复杂工艺控制系统在线参数优化方法”旨在解决复杂过程控制系统在线参数优化问题,提出了应用高斯过程回归和少量过程数据建立系统数学模型的方法,另外结合贝叶斯优化算法来寻找过程最优参数。此方法将建模与优化过程结合,极大提高优化效率和精度。此方法已经被应用于机器人高精度装配、机器人焊接、控制器参数调节等领域,可以被嵌入现有复杂过程控制系统中,实时对系统性能进行监控与调节。
日内瓦国际发明展创办于1973年,是目前世界上规模最大、连续举办历史最长的发明博览会,注重实用性和与市场的结合,与德国纽伦堡发明展、美国匹兹堡发明展并列世界三大发明展,由瑞士联邦政府、日内瓦州政府和世界知识产权组织联合举办。本次展会共吸引了来自40多个国家和地区的1000余项新发明参展。(中国日报辽宁记者站)


 美国迈阿密一机场出现巨型UFO
美国迈阿密一机场出现巨型UFO  高墙之内:探访泰国重刑犯监狱
高墙之内:探访泰国重刑犯监狱  丹麦小猫拥有奇异大眼 睡觉时仍半睁
丹麦小猫拥有奇异大眼 睡觉时仍半睁
 “双头姐妹”共享一个身体 已大学毕业
“双头姐妹”共享一个身体 已大学毕业  三万英尺高空下的地球 没想到竟如此美丽
三万英尺高空下的地球 没想到竟如此美丽  巴西:2016里约动漫节精彩上演 花式Cosplay美女趣味十足
巴西:2016里约动漫节精彩上演 花式Cosplay美女趣味十足
 里约奥运会前瞻:美国男子体操队运动员媒体写真
里约奥运会前瞻:美国男子体操队运动员媒体写真  2016里约奥运会和残奥会吉祥物亮相
2016里约奥运会和残奥会吉祥物亮相 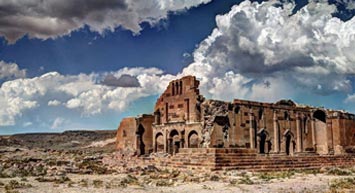 散落世界各地的宗教建筑 充满魔幻色彩呈现视觉盛宴
散落世界各地的宗教建筑 充满魔幻色彩呈现视觉盛宴
 伦敦:著名“不爽猫”蜡像亮相杜莎馆 与本尊合影傻傻分不清楚
伦敦:著名“不爽猫”蜡像亮相杜莎馆 与本尊合影傻傻分不清楚  里约奥运会前瞻:美国女篮媒体写真
里约奥运会前瞻:美国女篮媒体写真  英女子疯狂迷恋凯蒂猫 3万英镑存藏品
英女子疯狂迷恋凯蒂猫 3万英镑存藏品
 英国一核潜艇与商船相撞 核潜艇被撞坏
英国一核潜艇与商船相撞 核潜艇被撞坏 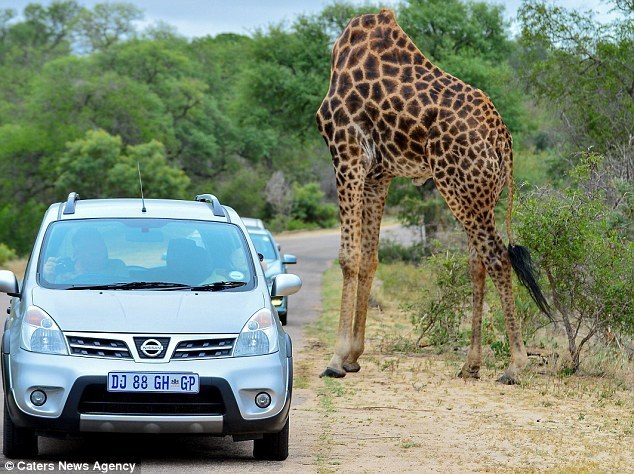 我的头呢?动物“神走位”造视觉错觉
我的头呢?动物“神走位”造视觉错觉 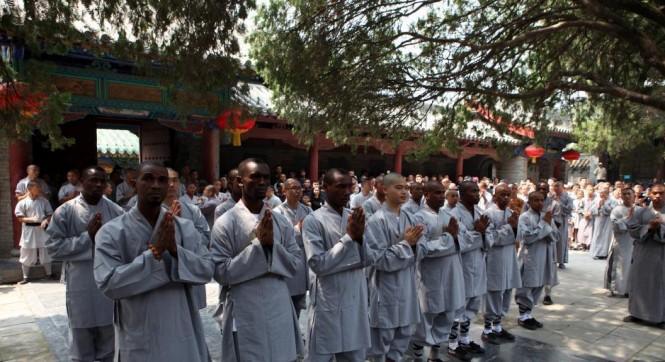 非洲弟子少林寺修行 释永信出席开班仪式
非洲弟子少林寺修行 释永信出席开班仪式
 湖北十堰现“绿松石王”重达215公斤 价格过千万
湖北十堰现“绿松石王”重达215公斤 价格过千万  乡村教师街头卖唱 赚钱为学生买教具
乡村教师街头卖唱 赚钱为学生买教具  万万没想到!9岁女孩头竟皮植入4个气球
万万没想到!9岁女孩头竟皮植入4个气球






